
cloudpainter Hardware Complete - 2 Robotic Arms and 5 Airbrushes

cloudpainter, as we currently imagine it, will have two 7bot robotic arms and five airbrushes on our Neural Jet painthead. The canvas will be on a track and move up and down between the painting tools.
We are thinking that when a painting begins, the Neural Jet will use its airbrushes to paint a quick background.

Then the canvas will be moved up to an area where the robotic arms can use artist brushes to touch up the painting. If it needs more airbrushing, it will move back to that area, back and forth as needed.

There is still a lot of fine tuning we need to make to the hardware to make all of this possible. But at least we now know the direction we are heading in and we can begin to write the software.

The Early Robots
Went searching for and found these images of the early robots.
The first robot started with a lot of wood pieces.

The very first paint head was a disaster, but this second one worked real well.

The Second Robot was built to be more mobile. It fit just barely through doors.

The third, of which I have lost all the photos except this one, was built to be massive. It filled a room. Also important was that it had an open face so I could photograph the painting more easily in order to use feedback loops in the painting logic.

After these unnamed machines came Crowd Painter, BitPaintr, Neural Jet, and cloudpainter.

Ten Years of Progress on Painting Robots

These pics both show my very first painting robot head and the most recent one. The first, which could hold only one brush, was made from parts found lying around my house including old pieces of wood, a handmade electromagnet, tape, and deck parts. The most recent can hold and operate nine different kinds of brushes and is almost completely 3D printed. Some of the plastic even glows in the dark.

Airbrush Actuator Complete
It is amazing how much an invitation from the White House can speed up development. Long hours this weekend went into getting a working airbrush prototype. While paint brushes will remain the primary mark making device in the Neural Jet, it will be cool to have them backed up by five airbrushes with the ability to quickly paint backgrounds.

Also cool that we went with the servos instead of something like a solenoid to control air flow. With our servos we can actuate the air coming out to 16 different pressures. So mixing becomes possible, and since we have 5 airbrushes on the paint head, the Neural Jet will be able to paint over 1,000,000 colors (16^5). Yeah this part of the project really is just re-inventing a printer, but coupled with the other mark making tools that are coming, it will be on the next level. You can see the prototype in action below.

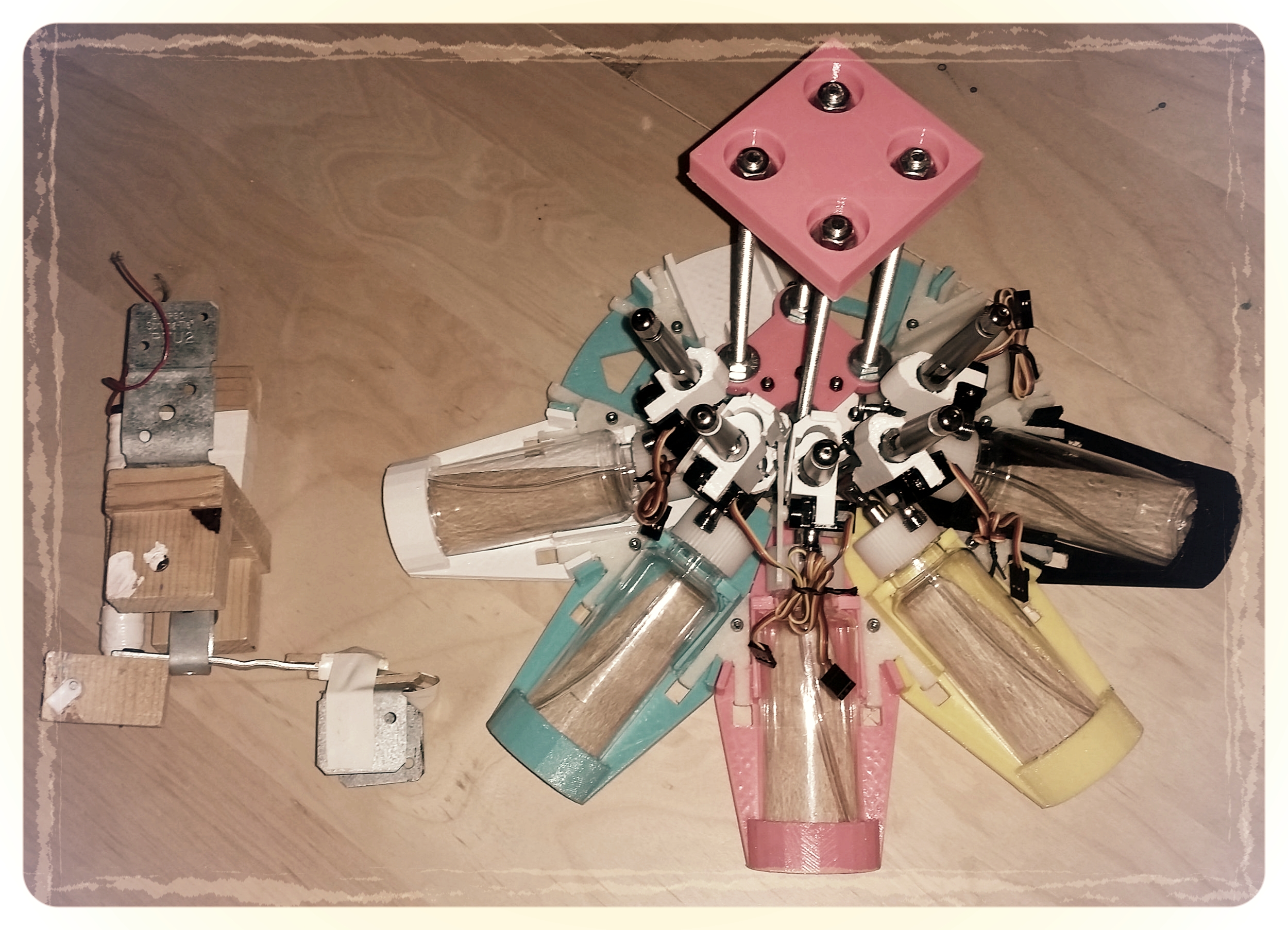
Neural Jet Modular Paint Head Complete

We have finished printing what we think will be the final paint tray. In the image above you can see how it will be oriented to the canvas when it is being used to paint. Coincidentally enough, we arrived at the final design on the Model T - Like Henry Ford's car.
(Model T) can hold multiple paint brushes and up to five airbrushes, with modules that fit three different types of airbrushes. People sometimes have a hard time imagining what we are showing in the photos, so I have included the following schematic that shows how the 5 airbrushes fit together.
The empty slots in the graphic above can be fitted with just about any mark making device, though I am partial to paint brushes. The reason we want to use paint brushes is that we have yet to find anything that can make marks similar to those in the image below. And thats what we are ultimately after.

Refined Paint Head (Model R)
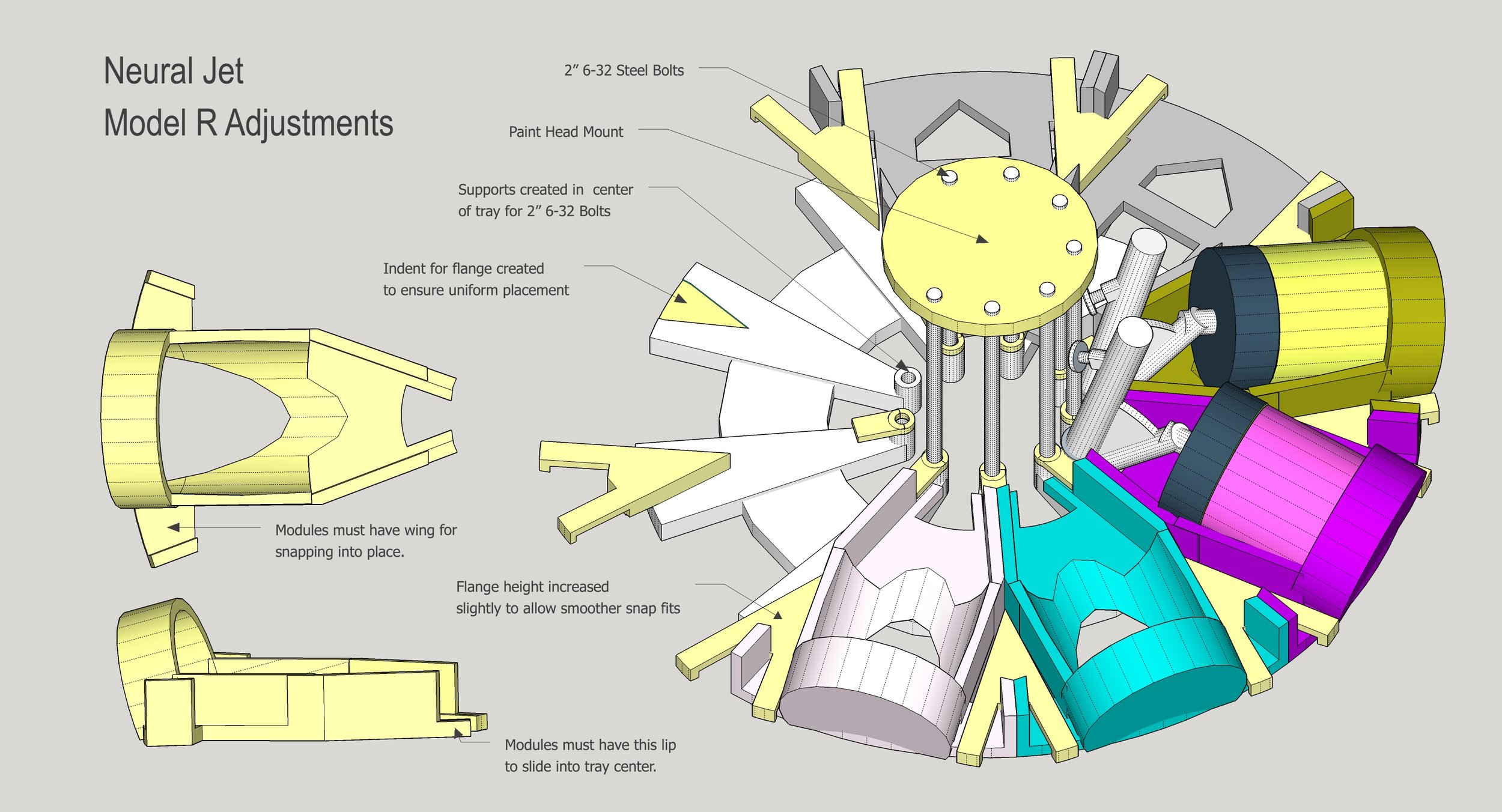
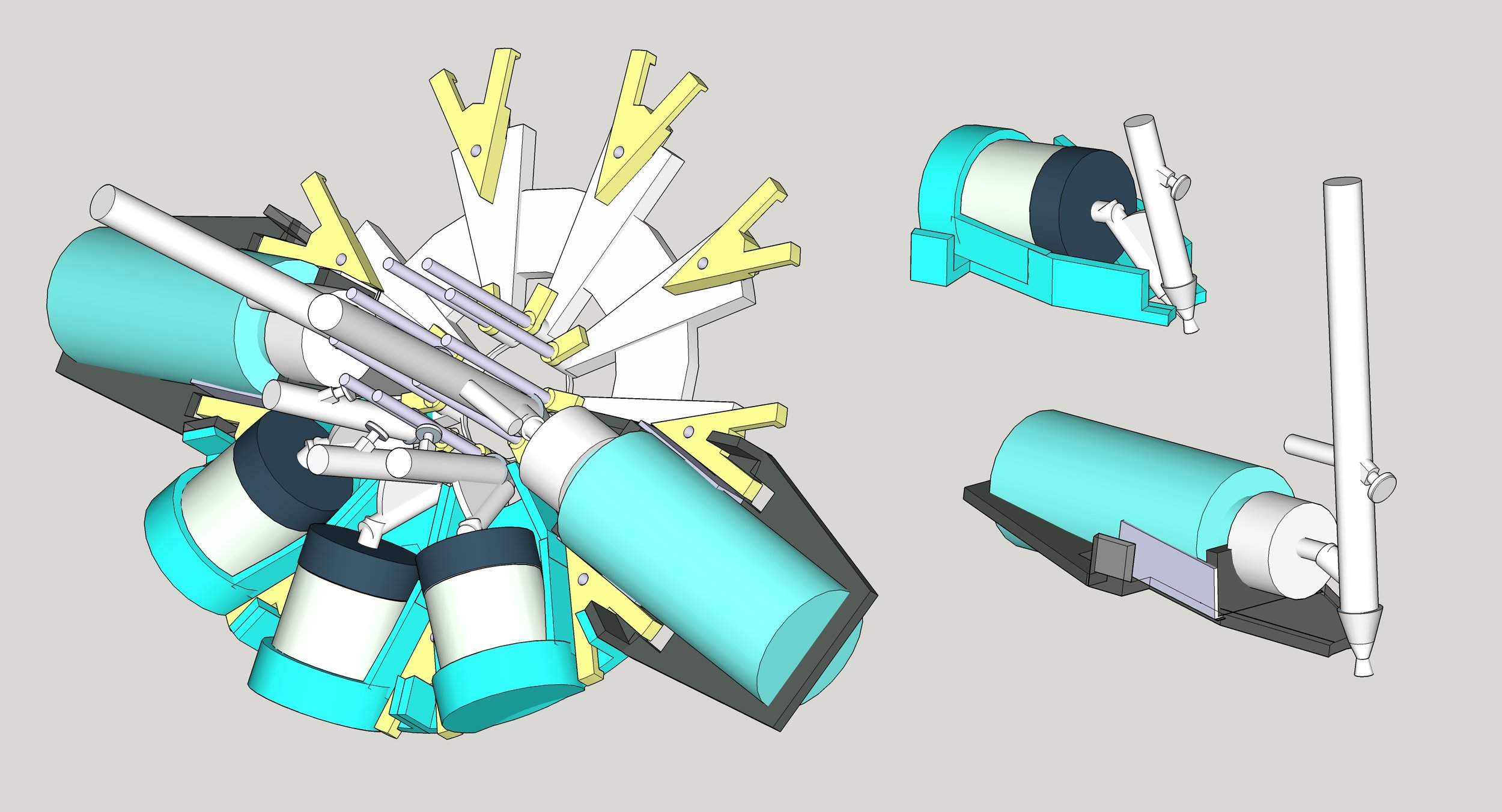
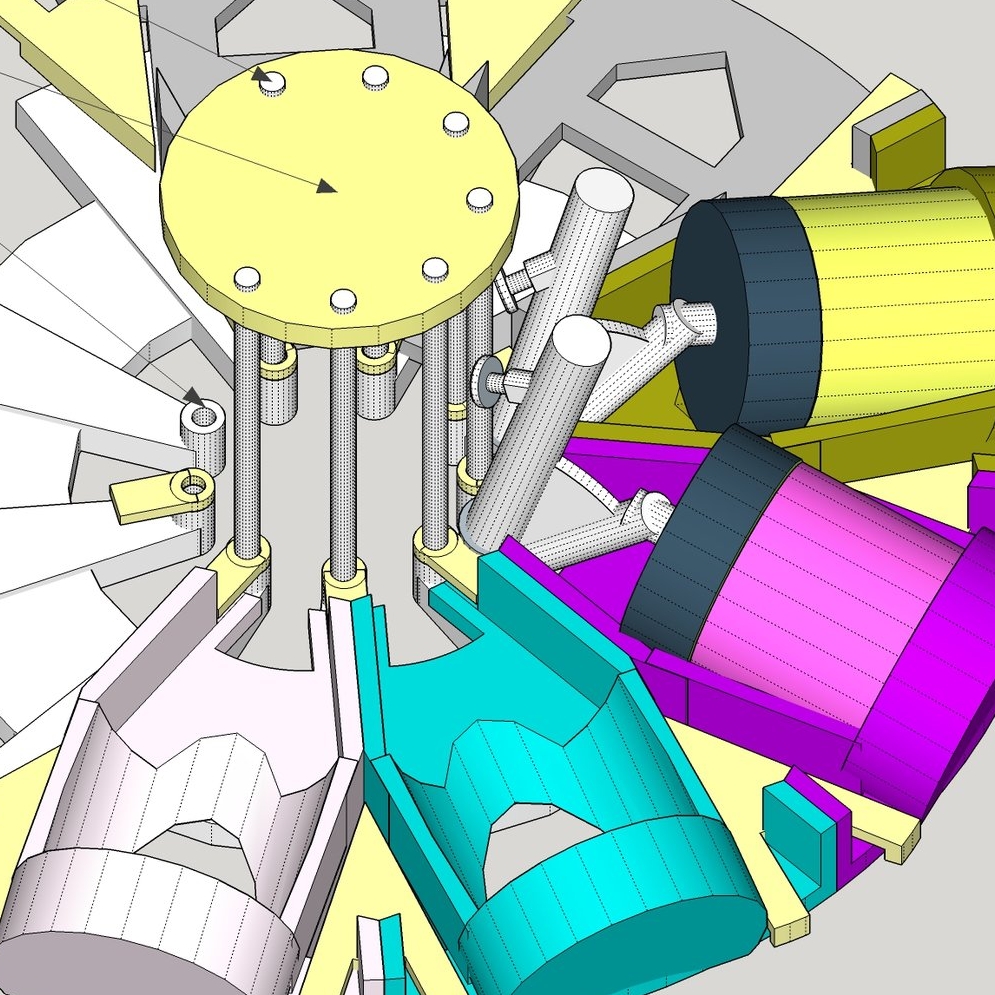
Based on the initial prototype, which we were actually very pleased with, we went back to the white board and tackled some of its shortcomings. The primary issue we had to address was how was a robot arm or xy-table going to hold on to this thing.
That was when Hunter came up with the idea of supporting the entire paint head from the center with 2" bolts. So we redesigned the tray to hold 9 2" 6-32 bolts. Above these bolts an aluminum disk would serve as the mounting surface. With this configuration any module that consisted of a 40 degree arc with a 3.5" radius, could just snap into place.
As always, here is the final Google Sketch file so anyone that wants to can design this along with us.

Paint Head Prototype Constructed
Hunter and I constructed the first prototype. It consisted of ten physical parts. The tray and nine plug-in modules. If you want to experiment along with us and this prototype, you can download the 3D plans from our downloads page.
Once 3D printing was complete, some parts of the tray were glued together with super glue. The modules could then snap into place and be removed as needed. While we hope the final paint head does not need any glue, we were experimenting with how things fit together and super glue offered us the most flexibility at this stage of construction.

Based on a several lessons learned with the Q prototype, we set out on a number of improvements for the next iteration. The main problem we are now trying to solve is how to suspend The Neural Jet from either an xy-table or a robotic arm.

First Robotic Head Mock-Up and Updates

As I paint 3 paintings for the backers eacha week, I am also making mock-ups of the new robotic head that I will be adding to the robot. Above is the first mock-up. I put it together only to realize that there were lots of problems with the design. But thats cool 'cause I have a whole load of friends looking at this and helping iron things out - and that part is turning out to be more fun than expected.
The main problem with this design that I didn't see until I built the mock-up is that half of the airbrushes would be upside down when mounted on my robot at a 45 degreen angle. So only 3 of the airbrushed would really work correctly. I need 5 at a minimum.
Also I showed the design to my friend and colleague Mark, the same one who I mentioned in previous post that printed his own 3D printer. He suggested I make each airbrush holder modular - and have them snap together when ready to paint. Have I mentioned he also has done work at NASA - so I take his advice really seriously and really like the concept of a modular robotic head that snaps together. It would make swapping colors really fast and easy, maybe color changes can even be done robotically if we design it right.
Another cool thing about Mark is that he is into sharing all of this. So we spoke briefly and decided that when we came up with a design and plans, we would post it on our site so anyone could build their own version of whatever we come up with.
Will try and get another mock-up done this week and post it along with the next set of paintings in schedule next week.
New Robot Design Finalized - Will be ready in 3-6 months...
Getting through your paintings at about 3 a week, Will post schedule of next 6 portraits some time around Sunday. If you need yours sooner than later, let me know.
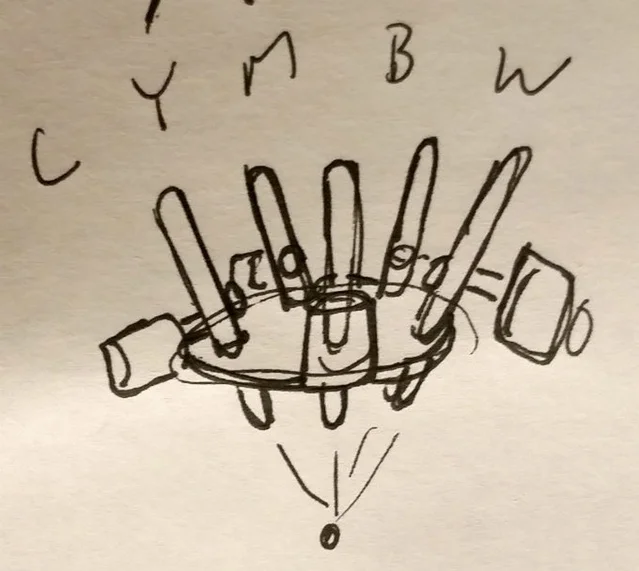
CMYKW NeuralJet Printer
So I am zeroing in on the final design of bitPaintr. Above is a quick sketch of the concept that I am leaning towards. In addition to an artist's brush, I am adding between 3 and 6 airbrushes that will operate very similar to an inkjet printer by mixing Cyan, Yellow, Magenta, and Black ink to try and replicate as many colors in the spectrum as possible. Better than an inkjet, it will also include White and possibly some other mystery ink or finish. The airbrushes will not replace the brush, but be used for quickly filling in backgrounds. Another concept that I am considering is to let humans paint with the artist brush while allowing the robot's AI to paint with the airbrushes. Thinking of calling it a NeuralJet Printer.

But don't worry, this will not be a printer in the traditional sense. I promise that it will be just as messy and ridiculous as all my previous robots. I have never even used an airbrush before, so I have no idea how I am going to program my robot to use one. Another way I am leaving my comfort zone is following the advice of my friend Mark to switch to pneumatics. Mark has also been telling me to use airbrushes for years now. I am finally listening to all his advice. Before last week, I didn't even know how to spell pneumatics and I had never used an airbrush. Despite this I fully intend to convert my robot into an air powered system in the next 3-6 months.

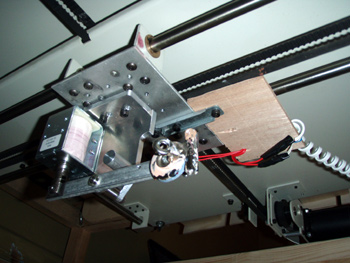
New Painting Robotic Head with Camera and Light

About a month ago, I added real time recording capabilities to my painting robot. Above is a picture of the newly fabricated robotic head. The protective wood case contains a real time camera. It takes images of the painting from a birds eye view. A fluorescent light was also added in a temporary test installation (notice the zip ties). If the light proves durable, it will become a permanent part of the robotic head.
This improvement adds two capabilities. The first is that it post real time images of paintings as they are being painted. This allows patrons who commission portrait and paintings to watch the painting being made. It also allows me to monitor the painting romotely and check on its progress. Since paintings take between 12-48 hours to complete, this is a very useful tool.
The second capability that this adds is related to painting quality. Prior to the camera, my algorithms were painting blind. Instructions were sent to the robotic head and it painted with no feedback from how well it was executing the painting. Now my algorithms can monitor how well a painting is being executed and make adjustments as needed. To put this in persepective, try closing your eyes and drawing. Now open your eyes and perform the same drawing. The difference in quality should be obvious. My painting robot is no longer painting with its eyes closed…

New Robotic Head Installed on Painting Robot
In a post long ago I promised to show a history of robotic heads used by my painting art robot, Zanelle. Here it finally is. Below are pictures of the first three robotic heads that were used to hold a brush and apply brush strokes to canvas. None of these are being used any longer. They have been replaced by my fourth and fifth robotic head, the fifth one is pictured even further below.

The first head was absurd (top). A hand wrapped electro magnet that worked so poorly I had to have counter weights on the opposite side of the brush. But it made cool strokes. Unfortunately it only lasted a couple of weeks before I replaced it.
The second head was awesome (middle). Completely hand made primarily with wood, this robotic head painted for over a year without failure. I just retired it today and replaced it with a new head. Its only problem was that it would overheat and loose electromagnetic strength the longer it was in operation.
The third head was acceptable (bottom). It worked O.K., but didn’t have the style of the second. Also, it would jam occasionally. That is why when the fourth robotic head was constructed, I replacedis one with it instead of the second.
The fourth robotic head (unpictured), looks very similar to the fifth robotic head which is pictured below. It was designed and fabricated by Jacobus McKenzie. It does a majority of my paintings these days.
The fifth robotic head (above), was just installed on one of my painting robots. It too was designed and fabricated by Jacobus McKenzie. I worked with him to make a couple of improvements over the fourth one. I do not know how well it works yet as it is currently in the middle of a test run.
Will keep you updated…
Pindar







